Segmentación básica de imágenes
Publicado:
Declaración de librerías
Imágenes a utilizar
En esta ocasión se usarán cartas de póquer para establecer la
segmentación de objetos. Las imágenes img_07c, img_09d, img_10c y
img_10t contienen una sola carta, en este caso se pretenderá
identificar cuantos elementos la constituyen: números y figuras. Por su
porte, las imágenes img_all y img_4a6 contienen varias cartas, por
lo que se pretenderá identificar cuántas cartas hay en la imagen. Todas
las imágenes tienen licencia Creative Commons y fueron obtenidas con el
buscador
DuckDuckGo.
img_07c = cv.imread('im/07c.jpg')
img_09d = cv.imread('im/09d.png')
img_10c = cv.imread('im/10c.jpg')
img_10t = cv.imread('im/10t.jpg')
img_all = cv.imread('im/all.png')
img_4a6 = cv.imread('im/4a6.jpg')
Segmentación con Canny
Primero seleccionaremos una de las seis imágenes de trabajo:
im = img_4a6
im = cv.cvtColor(im, cv.COLOR_BGR2GRAY)
im = cv.cvtColor(im, cv.COLOR_BGR2RGB)
plt.imshow(im)
plt.title("Imagen original"), plt.xticks([]), plt.yticks([])
plt.show()
Una vez que seleccionamos una imagen en escala de grises, es posible obtener una imagen binaria con los bordes claramente identificados gracias al algoritmo de Canny.
# Los números son las intensidades min y máx para identificar el borde
canny = cv.Canny(im, 25, 100)
cv.imwrite('out/canny.jpg', canny)
Ahora procederemos a la segmentación de la imagen. El método
cv.findContours() encuentra los contornos en una imagen binaria
(primer parámetro). Debe especificarse el algoritmo que usará para
encontrar los contornos (segundo parámetro):
RETR_EXTERNAL: Detecta solo los bordes más externos.RETR_LIST: Detecta todos los contornos.RETR_CCOMPyRETR_TREE: Detectan todos los bordes y establecen alguna jerarquía entre ellos.
El último parámetro establece el método de aproximación para el contorno, los principales son:
CHAIN_APPROX_NONE: Almacena absolutamente todos los puntos de contorno.CHAIN_APPROX_SIMPLE: Comprime segmentos horizontales, verticales y diagonales y deja sólo sus puntos finales.
Al cambiar este último parámetro no se han observado cambios en el resultado.
Por su parte el método drawContours() dibujará los contornos sobre la
imagen original (primer parámetro); para ello debe acceder a los
contornos previamente obtenidos (segundo parámetro). El tercer parámetro
es aquel contorno específico a dibujar, -1 significa todos. Los
parámetros siguientes serán el color del contorno y su
grosor.\citep{Madhav2019Image, OpenCV2021OpenCV}
contours, hierarchy = cv.findContours(canny, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_NONE)
out = cv.drawContours(im, contours, -1, (64,255,64), 1)
cv.imwrite('out/out.jpg', out)
print('Número de contornos/objetos encontrados: ', len(contours))
Número de contornos/objetos encontrados: 4
canny = cv.cvtColor(canny, cv.COLOR_BGR2RGB)
out = cv.cvtColor(out, cv.COLOR_BGR2RGB)
plt.subplot(211)
plt.imshow(canny)
plt.title('Imagen Canny'), plt.xticks([]), plt.yticks([])
plt.subplot(212)
plt.imshow(out)
plt.title('Imagen segmentada'), plt.xticks([]), plt.yticks([])
plt.show()
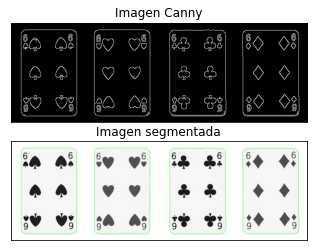
Como puede observarse en la imagen, los contornos son dibujados
propiamente, sin embargo, el número de contornos puede no coincidir con
el número de objetos en la imagen. Por ejemplo, los tréboles de la carta
img_10t, debido a lo angosto de la parte media del dibujo pueden ser
identificados como dos objetos y no como uno. A continuación se presenta
una lista con la relación de objetos y contornos detectados:
| Imagen | Objetos observables | Segmentos detectados |
|---|---|---|
| img_07c | 11 | 11 |
| img_09d | 13 | 14 |
| img_10c | 16 | 16 |
| img_10t | 16 | 18 |
| img_all | 52 | 56 |
| img_4a6 | 4 | 4 |
Es bien sabido que el algoritmo de Canny aplica una reducción de ruido con un filtro gaussiano como primer paso. Parece ser que no es suficiente en todos los casos.
Segmentación con umbralado
Es posible usar un umbralado directo para generar una imagen en binario.
En este caso usaremos solo las imágenes que presentaron fallas en la
sección anterior: img_09d, img_10t y img_all.
Este método mejora el resultado siempre y cuando la variable thresh
tenga el valor ideal\citep{Madhav2019Image}. Aquí se coloca el ejemplo
que funciona con la imagen img_09d donde thresh = 32, para corregir
la imagen img_all es necesario establecer thresh = 160.
Se hizo la prueba cambiando el algoritmo de umbralado a THRESH_OTSU,
pero no se observó ninguna mejora.
im = img_09d im = cv.cvtColor(im, cv.COLOR_BGR2GRAY) # Imagen en binario thresh = 32 #Los bits del umbralado binary = cv.threshold(im, thresh, 255, cv.THRESH_BINARY)[1]
im = cv.cvtColor(im, cv.COLOR_BGR2RGB)
plt.imshow(im)
plt.title("Imagen original"), plt.xticks([]), plt.yticks([])
plt.show()

contours, hierarchy = cv.findContours(binary, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
out = cv.drawContours(im, contours, -1, (64,255,64), 3)
cv.imwrite('out/bin.jpg', binary)
cv.imwrite('out/bin_out.jpg', out)
print('Número de contornos/objetos encontrados: ', len(contours))
Número de contornos/objetos encontrados: 13
binary = cv.cvtColor(binary, cv.COLOR_BGR2RGB)
plt.subplot(121)
plt.imshow(binary)
plt.title('Imagen binaria'), plt.xticks([]), plt.yticks([])
plt.subplot(122)
plt.imshow(out)
plt.title('Imagen segmentada'), plt.xticks([]), plt.yticks([])
plt.show()
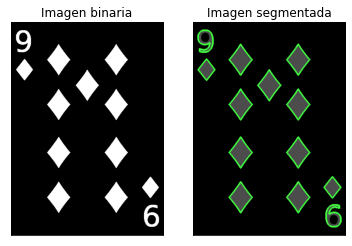
Es posible observar los siguientes resultados mediante este método:
| Carta | Objetos observables | Segmentos detectados (Umbral) |
|---|---|---|
| img_09d | 13 | 13 (32) |
| img_10t | 16 | 1 |
| img_all | 52 | 52 (160) |
Así como sucede en el caso de la imagen img_10t, es posible que este
método encuentre como contorno más externo los límites de la imagen,
esto es posible solucionando si el algoritmo del método
cv.findContours() cambia a RETR_LIST. Esto mejorará el
comportamiento porque será posible identificar los contornos internos,
no solo los externos. Pese a esto, en la mayoría de los casos eleva
demasiado el número de bordes encontrados en la imagen. Aquí se ha
colocado el código que da los mejores resultados en general para todas
las imágenes.
Segmentación con color
Otra forma de identificar los segmentos es usando el color en el proceso. La ventaja de este método es que permitirá identificar objetos que se encuentren en un rango de color.\citep{Maindola20214}
im = img_10t
im = cv.cvtColor(im, cv.COLOR_BGR2RGB)
plt.imshow(im)
plt.title("Imagen original"), plt.xticks([]), plt.yticks([])
plt.show()
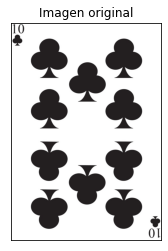
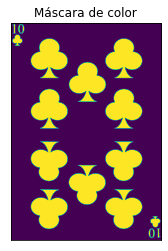
Es necesario especificar el rango de color de interés. En el siguiente código se comentan los valores que encontrarían en una carta roja y se aplican aquellos que tienen que ver con el negro, propio de la imagen seleccionada.
#light_red = (205, 0, 0)
#dark_red = (255, 200, 200)
#mask = cv.inRange(im, light_red, dark_red)
light_black = (205, 205, 205)
dark_black = (0, 0, 0)
mask = cv.inRange(im, dark_black, light_black)
cv.imwrite('out/color_mask.jpg', mask)
plt.imshow(mask)
plt.title("Máscara de color"), plt.xticks([]), plt.yticks([])
plt.show()
contours, hierarchy = cv.findContours(mask, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
out = cv.drawContours(im, contours, -1, (64,255,64), 3)
cv.imwrite('out/color_out.jpg', out)
print('Número de contornos/objetos encontrados: ', len(contours))
Número de contornos/objetos encontrados: 16
plt.imshow(out)
plt.title("Segmentación por color"), plt.xticks([]), plt.yticks([])
plt.show()
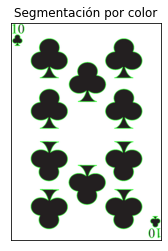
En esta ocasión fue posible obtener el resultado deseado para la última
imagen pendiente: img_10t. Además este método es preciso con otras
imágenes similares. En caso seleccionar una imagen con varias cartas,
este método encontraría todos los elementos del color de interés, mas no
contaría el número de cartas que aparecen en la imagen. Lo anterior
puede ser muy útil para encontrar muchos objetos que compartan el mismo
rango de color, en este caso, todos los objetos rojos o negros.
Conclusión
La segmentación de una imagen es un trabajo de precisión. Es necesario elegir el curso de acción adecuado para cada situación, debido a que hasta donde puede verse, no existe una forma que presente un resultado satisfactorio para todos los casos, incluso si la dificultad que presentan las imágenes es relativamente sencilla.
Para el presente caso, la segmentación con color parece ser un procedimiento fácilmente adaptable para imágenes que no exceden los dos colores, sin embargo podría traer problemas si la imagen a procesar tiene mayor número de colores.
Finalmente, decir que los procedimientos aquí enunciados, junto con el código en forma de notebook de Python y los resultados con bibliografía en formato PDF son visibles en los archivos de código disponibles en el repositorio del proyecto.